深度学习之 YOLO v1,v2,v3
YOLO v1
这是继RCNN,fast-RCNN和faster-RCNN之后,rbg(RossGirshick)针对DL目标检测速度问题提出的另外一种框架。YOLO V1其增强版本GPU中能跑45fps,简化版本155fps。
1. YOLO的核心思想
YOLO的核心思想就是利用整张图作为网络的输入,直接在输出层回归bounding box的位置和bounding box所属的类别。
faster RCNN中也直接用整张图作为输入,但是faster-RCNN整体还是采用了RCNN那种 proposal+classifier的思想,只不过是将提取proposal的步骤放在CNN中实现了,而YOLO则采用直接回归的思路。
2.YOLO的实现方法
将一幅图像分成SxS个网格(grid cell),如果某个object的中心 落在这个网格中,则这个网格就负责预测这个object。
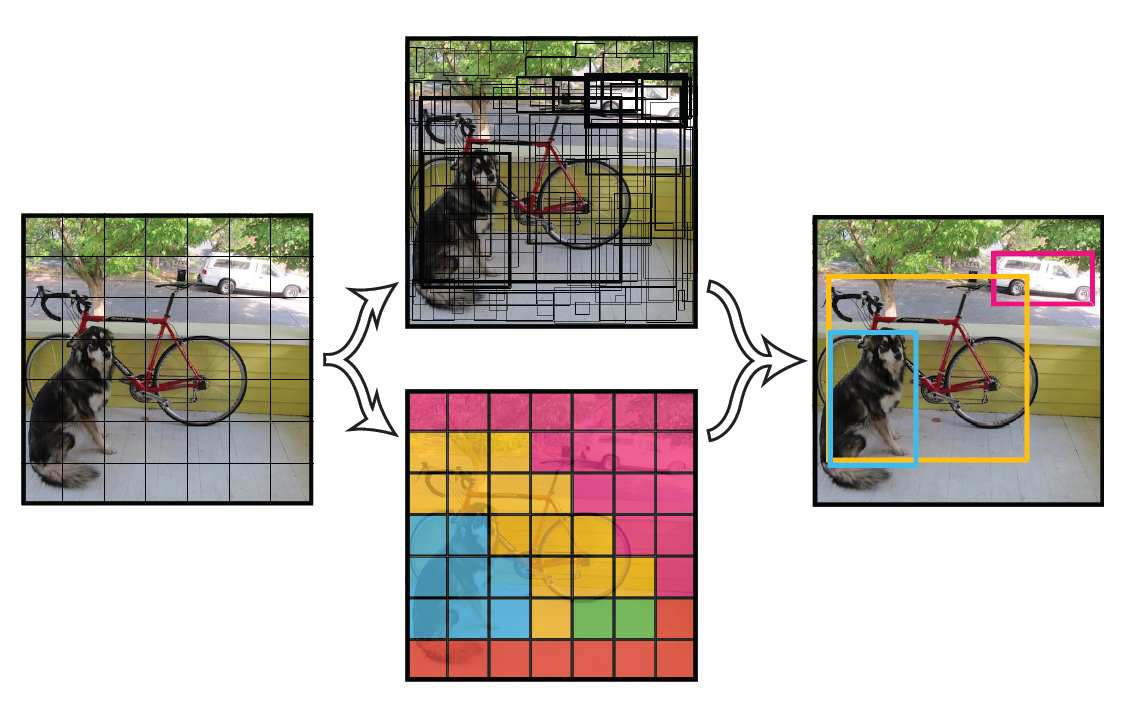
每个网格要预测B个bounding box,每个bounding box除了要回归自身的位置之外,还要附带预测一个confidence值。
这个confidence代表了所预测的box中含有object的置信度和这个box预测的有多准两重信息,其值是这样计算的:
其中如果有object落在一个grid cell里,第一项取1,否则取0。 第二项是预测的bounding box和实际的groundtruth之间的IoU值。
每个bounding box要预测(x, y, w, h)和confidence共5个值,每个网格还要预测一个类别信息,记为C类。则SxS个网格,每个网格要预测B个bounding box还要预测C个categories。输出就是S x S x (5*B+C)的一个tensor。
注意:class信息是针对每个网格的,confidence信息是针对每个bounding box的。
举例说明: 在PASCAL VOC中,图像输入为448x448,取S=7,B=2,一共有20个类别(C=20)。则输出就是7x7x(2x5+20)的一个tensor。
整个网络结构如下图所示: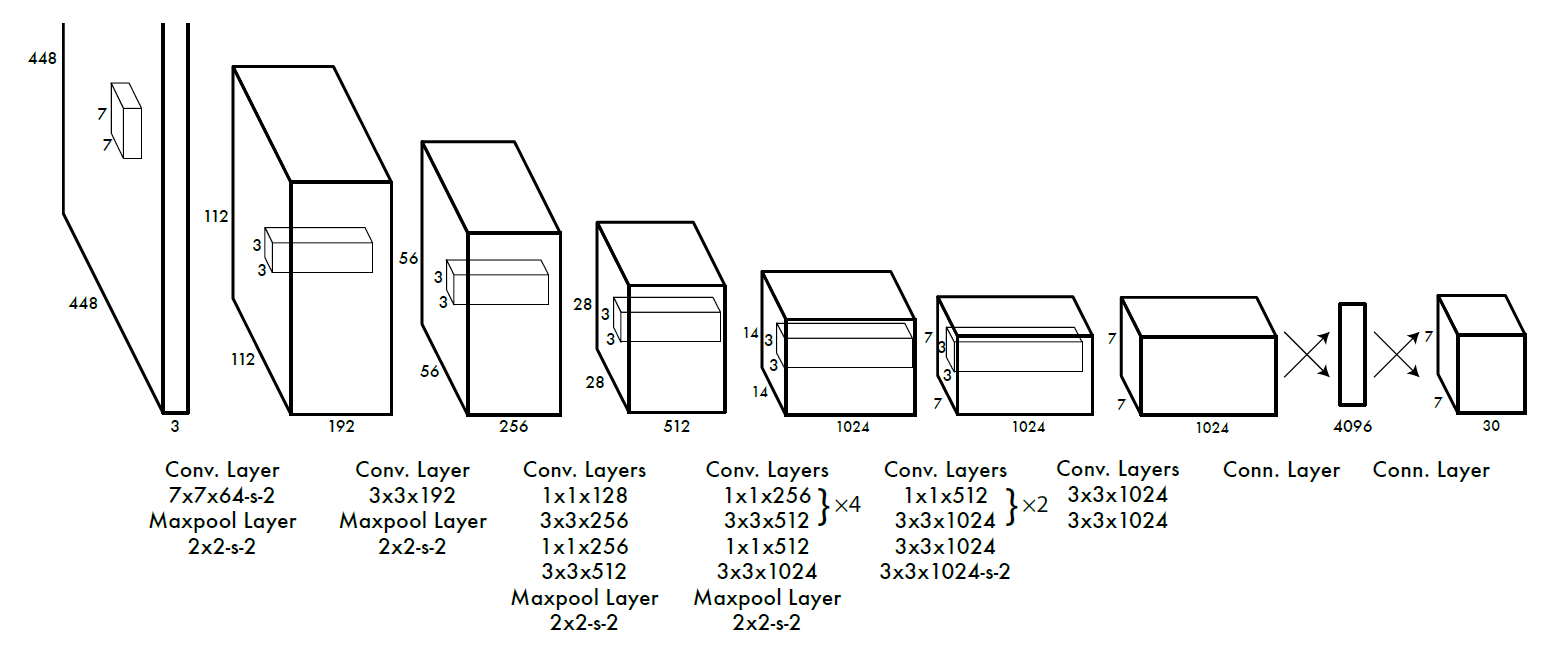
在test的时候,每个网格预测的class信息和bounding box预测的confidence信息相乘,就得到每个bounding box的class-specific confidence score:
等式左边第一项就是每个网格预测的类别信息,第二三项就是每个bounding box预测的confidence。这个乘积即encode了预测的box属于某一类的概率,也有该box准确度的信息。
得到每个box的class-specific confidence score以后,设置阈值,滤掉得分低的boxes,对保留的boxes进行NMS处理,就得到最终的检测结果。
*由于输出层为全连接层,因此在检测时,YOLO训练模型只支持与训练图像相同的输入分辨率。
*虽然每个格子可以预测B个bounding box,但是最终只选择只选择IOU最高的bounding box作为物体检测输出,即每个格子最多只预测出一个物体。当物体占画面比例较小,如图像中包含畜群或鸟群时,每个格子包含多个物体,但却只能检测出其中一个。这是YOLO方法的一个缺陷。
YOLO的实现细节
每个grid有30维,这30维中,8维是回归box的坐标,2维是box的confidence,还有20维是类别。
其中坐标的x,y用对应网格的offset归一化到0-1之间,w,h用图像的width和height归一化到0-1之间。
在实现中,最主要的就是怎么设计损失函数,让这个三个方面得到很好的平衡。作者简单粗暴的全部采用了sum-squared error loss来做这件事。
这种做法存在以下几个问题:
第一,8维的localization error和20维的classification error同等重要显然是不合理的;
第二,如果一个网格中没有object(一幅图中这种网格很多),那么就会将这些网格中的box的confidence push到0,相比于较少的有object的网格,这种做法是overpowering的,这会导致网络不稳定甚至发散。
解决办法:
- 更重视8维的坐标预测,给这些损失前面赋予更大的loss weight, 记为
 在pascal VOC训练中取5。
在pascal VOC训练中取5。 - 对没有object的box的confidence loss,赋予小的loss weight,记为
 在pascal VOC训练中取0.5。
在pascal VOC训练中取0.5。 - 有object的box的confidence loss和类别的loss的loss weight正常取1。
对不同大小的box预测中,相比于大box预测偏一点,小box预测偏一点肯定更不能被忍受的。而sum-square error loss中对同样的偏移loss是一样。
为了缓和这个问题,作者用了一个比较取巧的办法,就是将box的width和height取平方根代替原本的height和width。这个参考下面的图很容易理解,小box的横轴值较小,发生偏移时,反应到y轴上相比大box要大。(也是个近似逼近方式)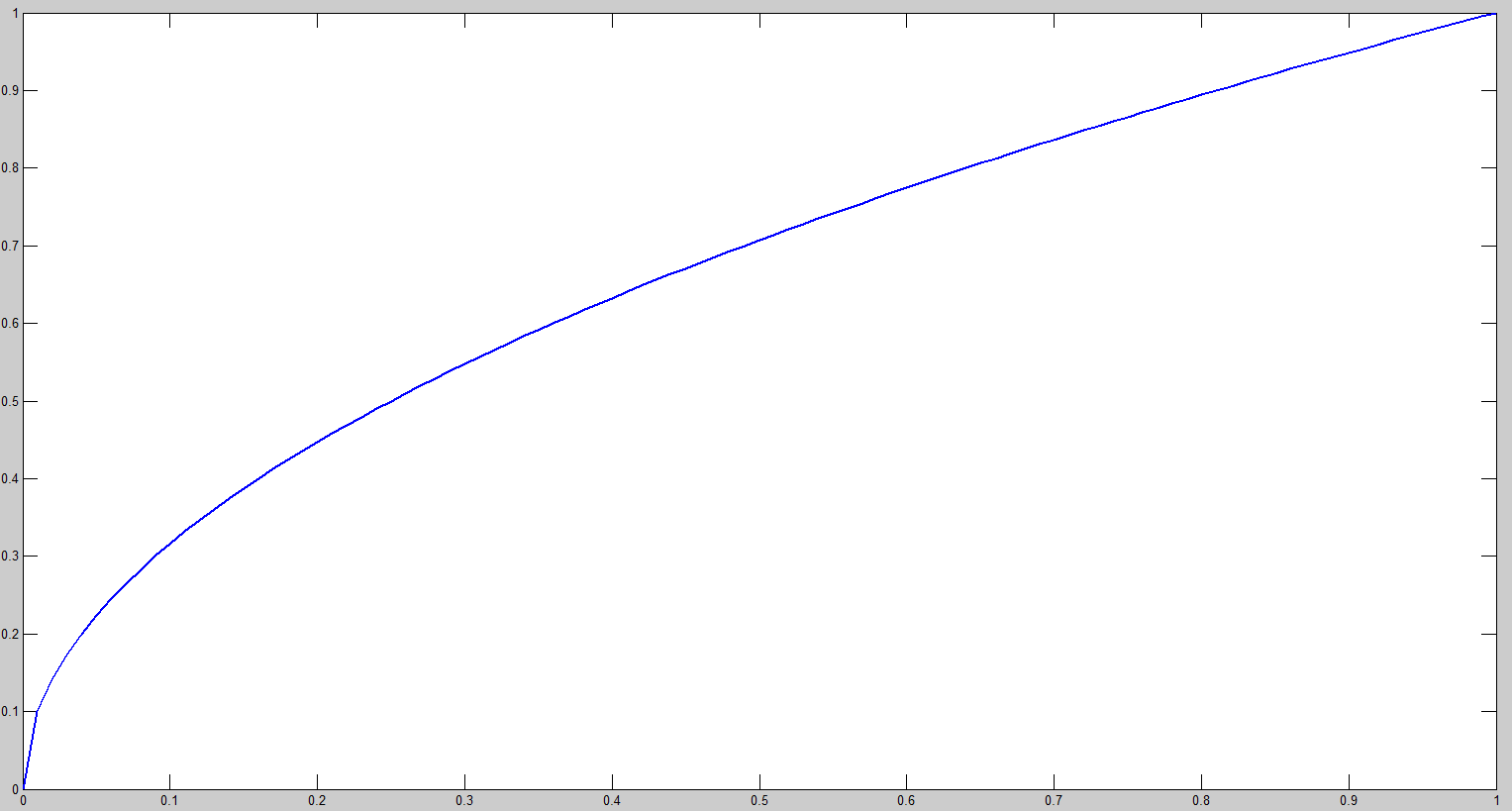
一个网格预测多个box,希望的是每个box predictor专门负责预测某个object。具体做法就是看当前预测的box与ground truth box中哪个IoU大,就负责哪个。这种做法称作box predictor的specialization。
最后整个的损失函数如下所示: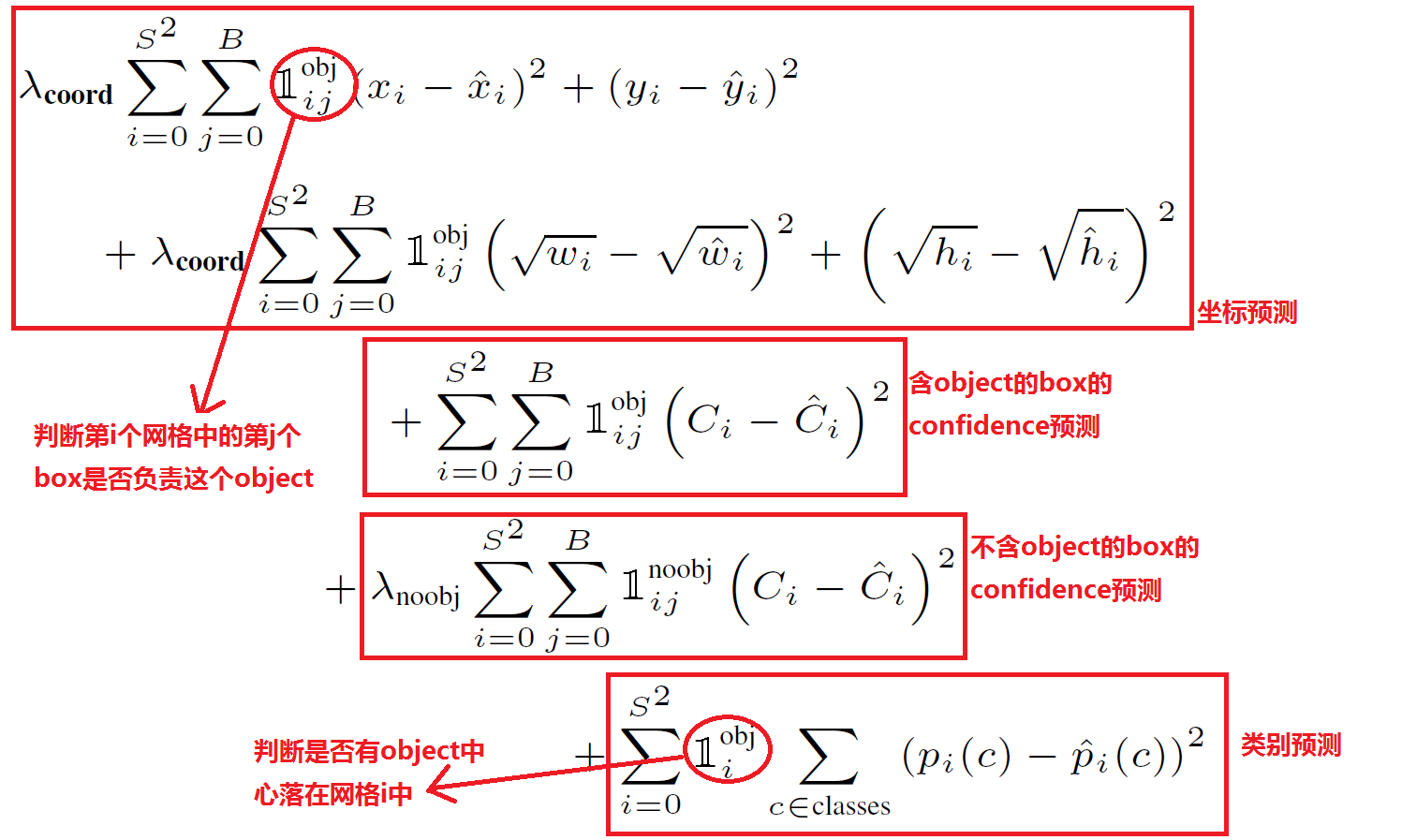
这个损失函数中:
- 只有当某个网格中有object的时候才对classification error进行惩罚。
- 只有当某个box predictor对某个ground truth box负责的时候,才会对box的coordinate error进行惩罚,而对哪个ground truth box负责就看其预测值和ground truth box的IoU是不是在那个cell的所有box中最大。
其他细节,例如使用激活函数使用leak RELU,模型用ImageNet预训练等等,在这里就不一一赘述了。
*YOLO方法模型训练依赖于物体识别标注数据,因此,对于非常规的物体形状或比例,YOLO的检测效果并不理想。
*YOLO采用了多个下采样层,网络学到的物体特征并不精细,因此也会影响检测效果。
* YOLO loss函数中,大物体IOU误差和小物体IOU误差对网络训练中loss贡献值接近(虽然采用求平方根方式,但没有根本解决问题)。因此,对于小物体,小的IOU误差也会对网络优化过程造成很大的影响,从而降低了物体检测的定位准确性。
YOLO的缺点
YOLO对相互靠的很近的物体,还有很小的群体检测效果不好,这是因为一个网格中只预测了两个框,并且只属于一类。
同一类物体出现的新的不常见的长宽比和其他情况时,泛化能力偏弱。
由于损失函数的问题,定位误差是影响检测效果的主要原因。尤其是大小物体的处理上,还有待加强。
YOLO9000 YOLOv2
YOLOv2的论文全名为YOLO9000: Better, Faster, Stronger.它斩获了CVPR 2017 Best Paper Honorable Mention。在这篇文章中,作者首先在YOLOv1的基础上提出了改进的YOLOv2,然后提出了一种检测与分类联合训练方法,使用这种联合训练方法在COCO检测数据集和ImageNet分类数据集上训练出了YOLO9000模型,其可以检测超过9000多类物体。所以,这篇文章其实包含两个模型:YOLOv2和YOLO9000,不过后者是在前者基础上提出的,两者模型主体结构是一致的。
摘要
- 提出YOLOv2:代表着目前业界最先进物体检测的水平,它的速度要快过其他检测系统(FasterR-CNN,ResNet,SSD),使用者可以在它的速度与精确度之间进行权衡。
- 提出YOLO9000:这一网络结构可以实时地检测超过9000种物体分类,这归功于它使用了WordTree,通过WordTree来混合检测数据集与识别数据集之中的数据。
- 提出了一种新的联合训练算法( Joint Training Algorithm ),使用这种联合训练技术同时在ImageNet和COCO数据集上进行训练。YOLO9000进一步缩小了监测数据集与识别数据集之间的代沟。
简介
目前的检测数据集(DetectionDatasets)有很多限制,分类标签的信息太少,图片的数量小于分类数据集(Classification Datasets),而且检测数据集的成本太高,使其无法当作分类数据集进行使用。而现在的分类数据集却有着大量的图片和十分丰富分类信息。
文章提出了一种新的训练方法–联合训练算法,这种算法可以把这两种的数据集混合到一起。使用一种分层的观点对物体进行分类,用巨量的分类数据集数据来扩充检测数据集,从而把两种不同的数据集混合起来。
联合训练算法的基本思路就是:同时在检测数据集和分类数据集上训练物体检测器(Object Detectors ),用监测数据集的数据学习物体的准确位置,用分类数据集的数据来增加分类的类别量、提升健壮性。
YOLO9000就是使用联合训练算法训练出来的,他拥有9000类的分类信息,这些分类信息学习自ImageNet分类数据集,而物体位置检测则学习自COCO检测数据集。
All of our code and pre-trained models are available online at http://pjreddie.com/yolo9000/
BETTER
YOLO一代有很多缺点,作者希望改进的方向是:改善recall,提升定位的准确度,同时保持分类的准确度。
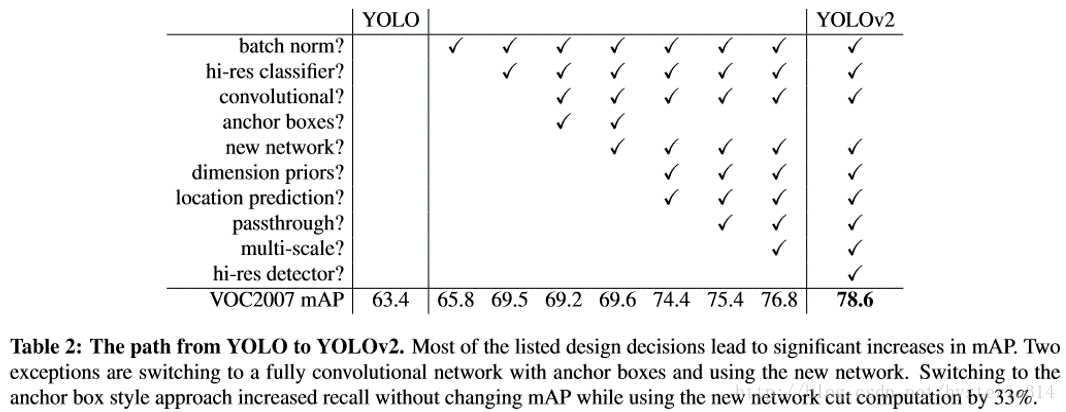
目前计算机视觉的趋势是更大更深的网络,更好的性能表现通常依赖于训练更大的网络或者把多种model综合到一起。但是YOLO v2则着力于简化网络。具体的改进见下表:
Batch Normalization
使用Batch Normalization对网络进行优化,让网络提高了收敛性,同时还消除了对其他形式的正则化(regularization)的依赖。
通过对YOLO的每一个卷积层增加Batch Normalization,最终使得mAP提高了2%,同时还使model正则化。使用Batch Normalization可以从model中去掉Dropout,而不会产生过拟合。High resolution classifier
目前业界标准的检测方法,都要先把分类器(classifier)放在ImageNet上进行预训练。从Alexnet开始,大多数的分类器都运行在小于256*256的图片上。而现在YOLO从224*224增加到了448*448,这就意味着网络需要适应新的输入分辨率。
为了适应新的分辨率,YOLO v2的分类网络以448*448的分辨率先在ImageNet上进行Fine Tune,Fine Tune10个epochs,让网络有时间调整他的滤波器(filters),好让其能更好的运行在新分辨率上,还需要调优用于检测的Resulting Network。最终通过使用高分辨率,mAP提升了4%。Convolution with anchor boxes
YOLO一代包含有全连接层,从而能直接预测Bounding Boxes的坐标值。 Faster R-CNN的方法只用卷积层与Region Proposal Network来预测Anchor Box的偏移值与置信度,而不是直接预测坐标值。作者发现通过预测偏移量而不是坐标值能够简化问题,让神经网络学习起来更容易。
所以最终YOLO去掉了全连接层,使用Anchor Boxes来预测 Bounding Boxes。作者去掉了网络中一个Pooling层,这让卷积层的输出能有更高的分辨率。收缩网络让其运行在416*416而不是448*448。由于图片中的物体都倾向于出现在图片的中心位置,特别是那种比较大的物体,所以有一个单独位于物体中心的位置用于预测这些物体。YOLO的卷积层采用32这个值来下采样图片,所以通过选择416*416用作输入尺寸最终能输出一个13*13的Feature Map。 使用Anchor Box会让精确度稍微下降,但用了它能让YOLO能预测出大于一千个框,同时recall达到88%,mAP达到69.2%。Dimension clusters
之前Anchor Box的尺寸是手动选择的,所以尺寸还有优化的余地。 为了优化,在训练集(training set)Bounding Boxes上跑了一下k-means聚类,来找到一个比较好的值。
如果我们用标准的欧式距离的k-means,尺寸大的框比小框产生更多的错误。因为我们的目的是提高IOU分数,这依赖于Box的大小,所以距离度量的使用:
通过分析实验结果(Figure 2),左图:在model复杂性与high recall之间权衡之后,选择聚类分类数K=5。右图:是聚类的中心,大多数是高瘦的Box。
Table1是说明用K-means选择Anchor Boxes时,当Cluster IOU选择值为5时,AVG IOU的值是61,这个值要比不用聚类的方法的60.9要高。选择值为9的时候,AVG IOU更有显著提高。总之就是说明用聚类的方法是有效果的。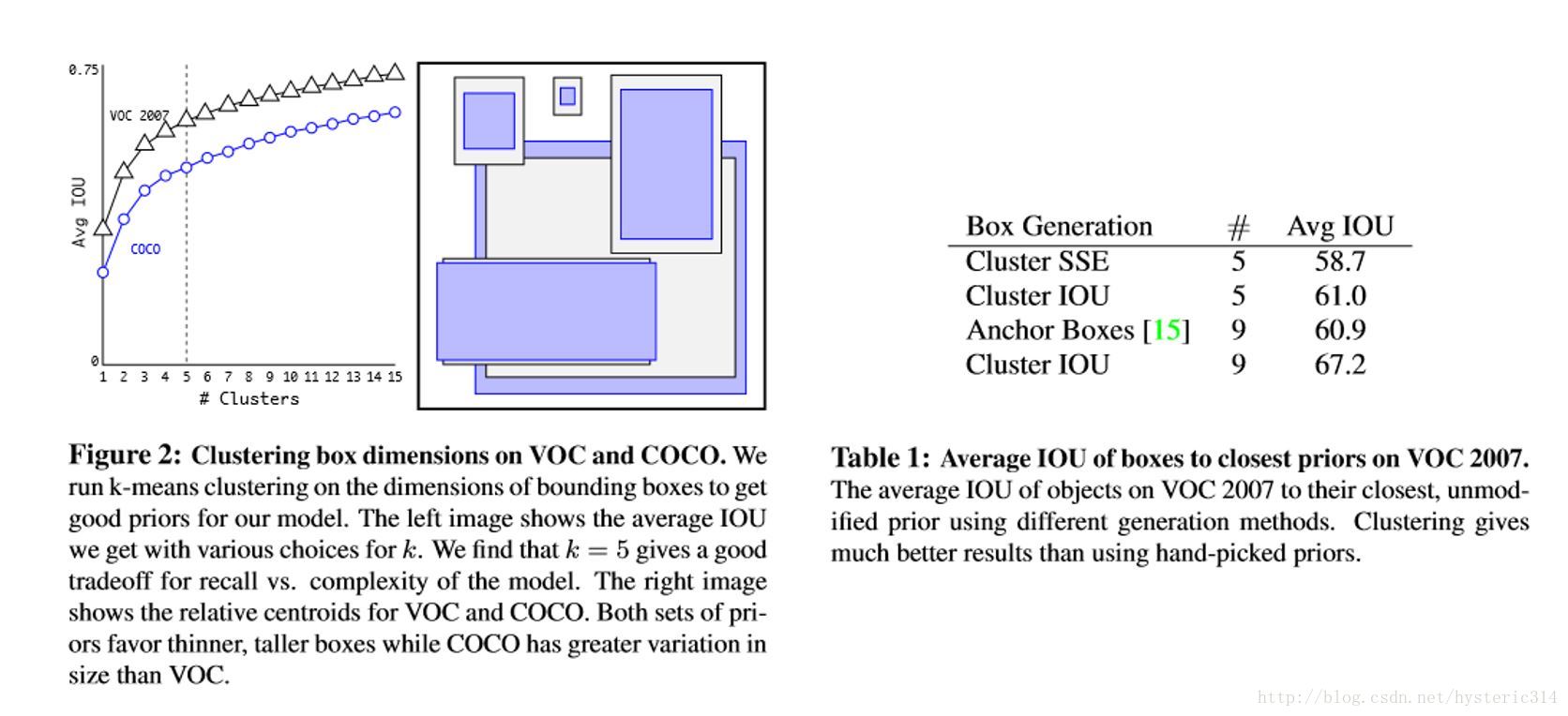
Direct location prediction
用Anchor Box的方法,会让model变得不稳定,尤其是在最开始的几次迭代的时候。大多数不稳定因素产生自预测Box的(x,y)位置的时候。按照之前YOLO的方法,网络不会预测偏移量,而是根据YOLO中的网格单元的位置来预测坐标,这就让Ground Truth的值介于0到1之间。而为了让网络的结果能落在这一范围内,网络使用一个 Logistic Activation来对于网络预测结果进行限制,让结果介于0到1之间。 网络在每一个网格单元中预测出5个Bounding Boxes,每个Bounding Boxes有五个坐标值tx,ty,tw,th,t0,他们的关系见下图(Figure3)。假设一个网格单元对于图片左上角的偏移量是cx,cy,Bounding Boxes Prior的宽度和高度是pw,ph,那么预测的结果见下图右面的公式:
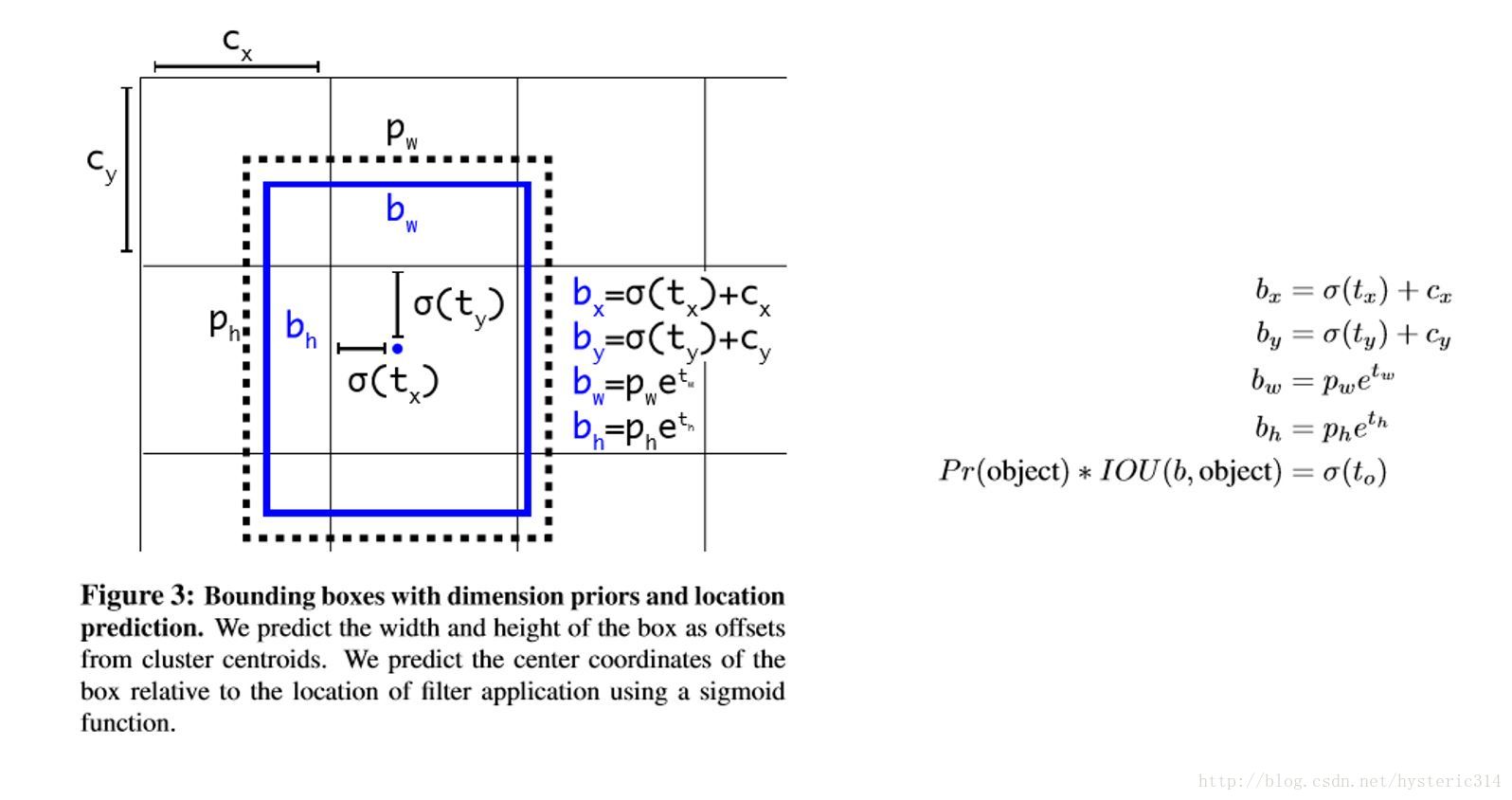
因为使用了限制让数值变得参数化,也让网络更容易学习、更稳定。
Dimension clusters和Direct location prediction,improves YOLO by almost 5% over the version with anchor boxes.Fine-Grained Features
YOLO修改后的Feature Map大小为13*13,这个尺寸对检测图片中尺寸大物体来说足够了,同时使用这种细粒度的特征对定位小物体的位置可能也有好处。Faster R-CNN、SSD都使用不同尺寸的Feature Map来取得不同范围的分辨率,而YOLO采取了不同的方法,YOLO加上了一个Passthrough Layer来取得之前的某个26*26分辨率的层的特征。这个Passthrough layer能够把高分辨率特征与低分辨率特征联系在一起,联系起来的方法是把相邻的特征堆积在不同的Channel之中,这一方法类似与Resnet的Identity Mapping,从而把26*26*512变成13*13*2048。YOLO中的检测器位于扩展后(expanded )的Feature Map的上方,所以他能取得细粒度的特征信息,这提升了YOLO 1%的性能。
Multi-ScaleTraining
作者希望YOLO v2能健壮的运行于不同尺寸的图片之上,所以把这一想法用于训练model中。
区别于之前的补全图片的尺寸的方法,YOLO v2每迭代几次都会改变网络参数。每10个Batch,网络会随机地选择一个新的图片尺寸,由于使用了下采样参数是32,所以不同的尺寸大小也选择为32的倍数{320,352…..608},最小320*320,最大608*608,网络会自动改变尺寸,并继续训练的过程。
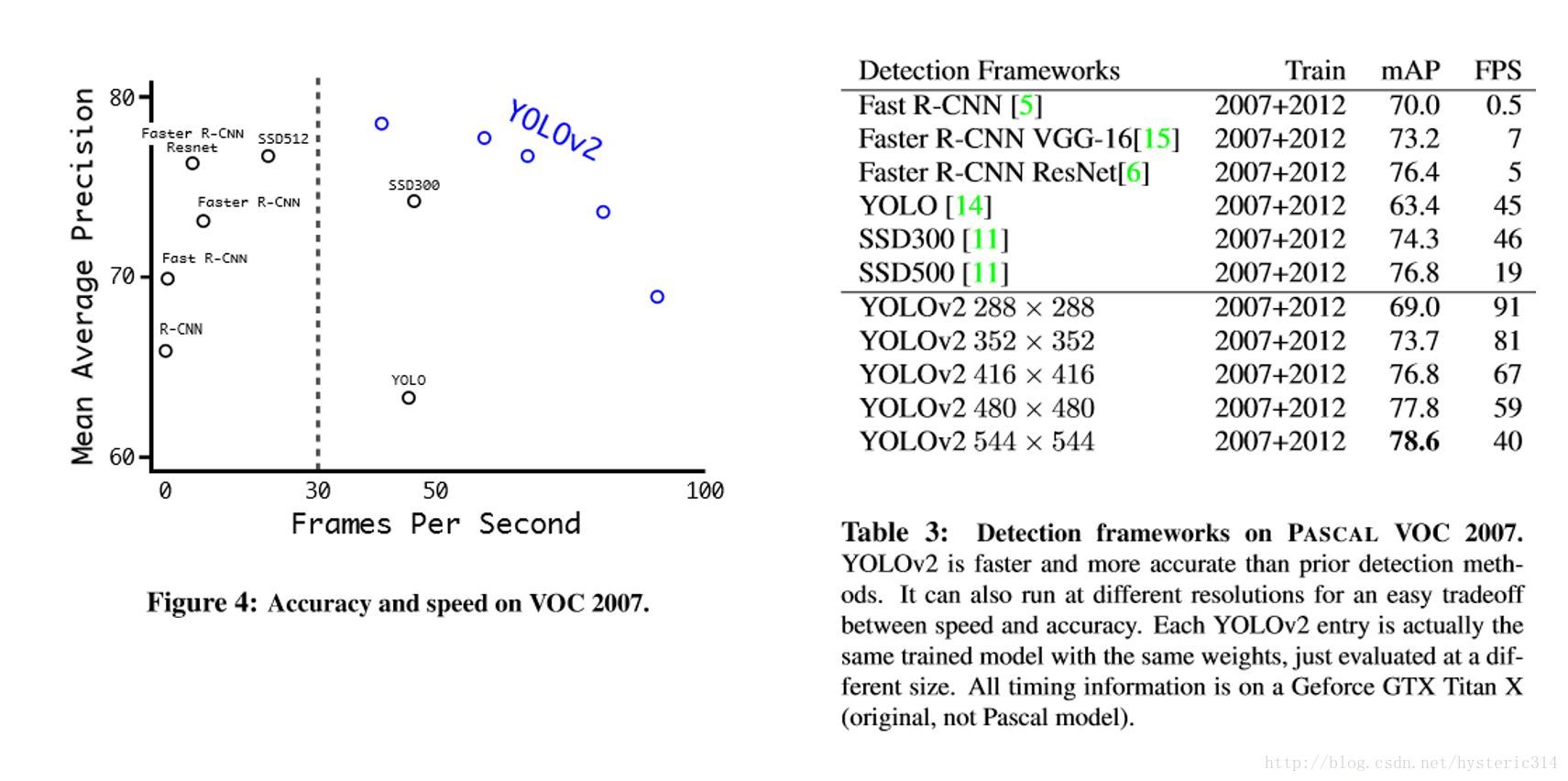
这一政策让网络在不同的输入尺寸上都能达到一个很好的预测效果,同一网络能在不同分辨率上进行检测。当输入图片尺寸比较小的时候跑的比较快,输入图片尺寸比较大的时候精度高,所以你可以在YOLO v2的速度和精度上进行权衡。Figure4,Table 3:在voc2007上的速度与精度
Further Experiments
Faster
YOLO使用的是GoogleLeNet,比VGG-16快,YOLO完成一次前向过程只用8.52 billion 运算,而VGG-16要30.69billion,但是YOLO精度稍低于VGG-16。
Draknet19
YOLO v2基于一个新的分类model,有点类似与VGG。YOLO v2使用3*3filter,每次Pooling之后都增加一倍Channels的数量。YOLO v2使用全局平均Pooling,使用Batch Normilazation来让训练更稳定,加速收敛,使model规范化。
最终的model–Darknet19,有19个卷积层和5个maxpooling层,处理一张图片只需要5.58 billion次运算,在ImageNet上达到72.9%top-1精确度,91.2%top-5精确度。Training for classification
网络训练在 ImageNet 1000类分类数据集,训练了160epochs,使用随机梯度下降,初始学习率为0.1, polynomial
rate decay with a power of 4, weight decay of 0.0005 and momentum of 0.9 。训练期间使用标准的数据扩大方法:随机裁剪、旋转、变换颜色(hue)、变换饱和度(saturation), 变换曝光度(exposure shifts)。
在训练时,把整个网络在更大的448*448分辨率上Fine Turnning 10个 epoches,初始学习率设置为0.001,这种网络达到达到76.5%top-1精确度,93.3%top-5精确度。Training for detection
网络去掉了最后一个卷积层,而加上了三个3*3卷积层,每个卷积层有1024个Filters,每个卷积层紧接着一个1*1卷积层, with
the number of outputs we need for detection。
对于VOC数据,网络预测出每个网格单元预测五个Bounding Boxes,每个Bounding Boxes预测5个坐标和20类,所以一共125个Filters,增加了Passthough层来获取前面层的细粒度信息,网络训练了160epoches,初始学习率0.001,dividing it by 10 at 60 and 90 epochs,a weight decay of 0.0005 and momentum of 0.9,数据扩大方法相同,对COCO与VOC数据集的训练对策相同。
Stronger
在训练的过程中,当网络遇到一个来自检测数据集的图片与标记信息,那么就把这些数据用完整的YOLO v2 loss功能反向传播这个图片。当网络遇到一个来自分类数据集的图片和分类标记信息,只用整个结构中分类部分的loss功能反向传播这个图片。
但是检测数据集只有粗粒度的标记信息,像“猫“、“ 狗”之类,而分类数据集的标签信息则更细粒度,更丰富。比如狗这一类就包括”哈士奇“”牛头梗“”金毛狗“等等。所以如果想同时在监测数据集与分类数据集上进行训练,那么就要用一种一致性的方法融合这些标签信息。
再者,用于分类的方法,大多是用softmax layer方法,softmax意味着分类的类别之间要互相独立的。而盲目地混合数据集训练,就会出现比如:检测数据集的分类信息中”狗“这一分类,在分类数据集合中,就会有的不同种类的狗”哈士奇“”牛头梗“”金毛“这些分类,这两种数据集之间的分类信息不相互独立。所以使用一种多标签的model来混合数据集,假设一个图片可以有多个分类信息,并假定分类信息必须是相互独立的规则可以被忽略。
Hierarchical classification
WordNet的结构是一个直接图表(directed graph),而不是树型结构。因为语言是复杂的,狗这个词既属于‘犬科’又属于‘家畜’两类,而‘犬科’和‘家畜’两类在wordnet中则是同义词,所以不能用树形结构。
作者希望根据ImageNet中包含的概念来建立一个分层树,为了建立这个分层树,首先检查ImagenNet中出现的名词,再在WordNet中找到这些名词,再找到这些名词到达他们根节点的路径(在这里设为所有的根节点为实体对象(physical object))。在WordNet中,大多数同义词只有一个路径,所以首先把这条路径中的词全部都加到分层树中。接着迭代地检查剩下的名词,并尽可能少的把他们添加到分层树上,添加的原则是取最短路径加入到树中。
为了计算某一结点的绝对概率,只需要对这一结点到根节点的整条路径的所有概率进行相乘。所以比如你想知道一个图片是否是Norfolk terrier的概率,则进行如下计算: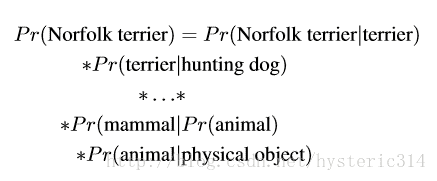
为了验证这一个方法,在WordTree上训练Darknet19的model,使用1000类的ImageNet进行训练,为了建立WordtTree 1K,把所有中间词汇加入到WordTree上,把标签空间从1000扩大到了1369。在训练过程中,如果有一个图片的标签是”Norfolk terrier“,那么这个图片还会获得”狗“(dog)以及“哺乳动物”(mammal)等标签。总之现在一张图片是多标记的,标记之间不需要相互独立。
如Figure5所示,之前的ImageNet分类是使用一个大softmax进行分类。而现在,WordTree只需要对同一概念下的同义词进行softmax分类。
使用相同的训练参数,这种分层结构的Darknet19达到71.9%top-1精度和90.4%top-5精确度,精度只有微小的下降。
这种方法的好处:在对未知或者新的物体进行分类时,性能降低的很优雅(gracefully)。比如看到一个狗的照片,但不知道是哪种种类的狗,那么就高置信度(confidence)预测是”狗“,而其他狗的种类的同义词如”哈士奇“”牛头梗“”金毛“等这些则低置信度。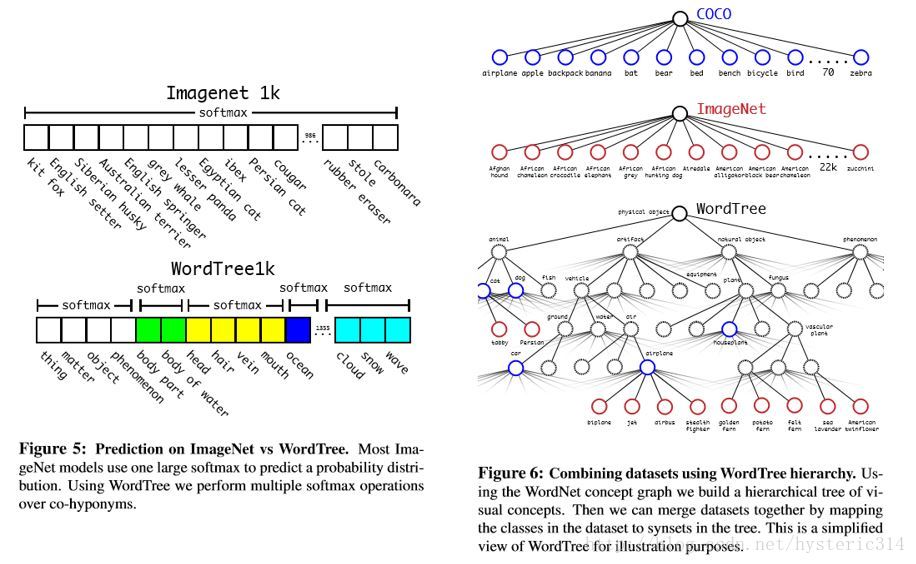
Datasets combination with wordtree
用WordTree 把数据集合中的类别映射到分层树中的同义词上,例如上图Figure 6,WordTree混合ImageNet与COCO。
Joint classification and detection
作者的目的是:训练一个Extremely Large Scale检测器。所以训练的时候使用WordTree混合了COCO检测数据集与ImageNet中的Top9000类,混合后的数据集对应的WordTree有9418个类。另一方面,由于ImageNet数据集太大了,作者为了平衡一下两个数据集之间的数据量,通过过采样(oversampling)COCO数据集中的数据,使COCO数据集与ImageNet数据集之间的数据量比例达到1:4。
YOLO9000的训练基于YOLO v2的构架,但是使用3priors而不是5来限制输出的大小。当网络遇到检测数据集中的图片时则正常地反方向传播,当遇到分类数据集图片的时候,只使用分类的loss功能进行反向传播。同时作者假设IOU最少为 .3。最后根据这些假设进行反向传播。使用联合训练法,YOLO9000使用COCO检测数据集学习检测图片中的物体的位置,使用ImageNet分类数据集学习如何从大量的类别中进行分类。
为了评估这一方法,使用ImageNet Detection Task对训练结果进行评估。
评估结果:
YOLO9000取得19.7mAP。
在未学习过的156个分类数据上进行测试,mAP达到16.0。
YOLO9000的mAP比DPM高,而且YOLO有更多先进的特征,YOLO9000是用部分监督的方式在不同训练集上进行训练,同时还能检测9000个物体类别,并保证实时运行。
虽然YOLO9000对动物的识别性能很好,但是对类别为”sungalsses“或者”swimming trunks“这些衣服或者装备的类别,它的识别性能不是很好,见table 7。这跟数据集的数据组成有很大关系。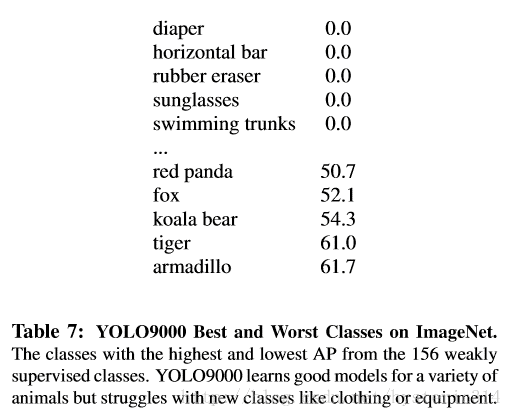
总结
YOLO v2 代表着目前最先进物体检测的水平,在多种监测数据集中都要快过其他检测系统,并可以在速度与精确度上进行权衡。
YOLO 9000 的网络结构允许实时地检测超过9000种物体分类,这归功于它能同时优化检测与分类功能。使用WordTree来混合来自不同的资源的训练数据,并使用联合优化技术同时在ImageNet和COCO数据集上进行训练,YOLO9000进一步缩小了监测数据集与识别数据集之间的大小代沟。
文章还提出了WordTree,数据集混合训练,多尺寸训练等全新的训练方法。
YOLO v3
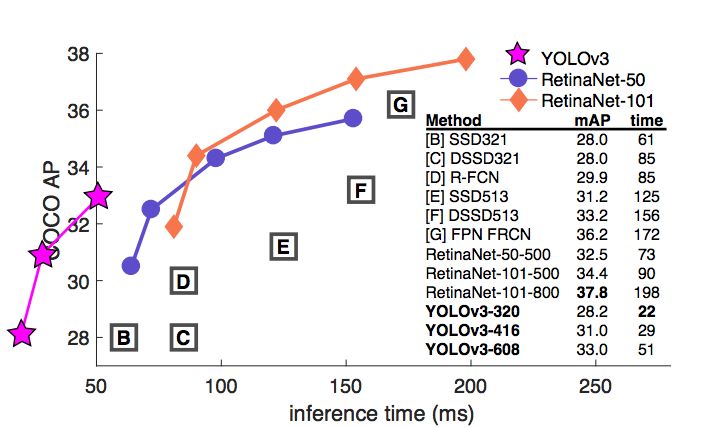
YOLOv3在Pascal Titan X上处理608x608图像速度达到20FPS,在 COCO test-dev 上 mAP@0.5 达到 57.9%,与RetinaNet(FocalLoss论文所提出的单阶段网络)的结果相近,并且速度快4倍.
YOLO v3的模型比之前的模型复杂了不少,可以通过改变模型结构的大小来权衡速度与精度。
速度对比如下:
 ‘
‘
YOLOv3 在实现相同准确度下要显著地比其它检测方法快。时间都是在采用 M40 或 Titan X 等相同 GPU 下测量的。
简而言之,YOLOv3 的先验检测(Prior detection)系统将分类器或定位器重新用于执行检测任务。他们将模型应用于图像的多个位置和尺度。而那些评分较高的区域就可以视为检测结果。此外,相对于其它目标检测方法,我们使用了完全不同的方法。我们将一个单神经网络应用于整张图像,该网络将图像划分为不同的区域,因而预测每一块区域的边界框和概率,这些边界框会通过预测的概率加权。我们的模型相比于基于分类器的系统有一些优势。它在测试时会查看整个图像,所以它的预测利用了图像中的全局信息。与需要数千张单一目标图像的 R-CNN 不同,它通过单一网络评估进行预测。这令 YOLOv3 非常快,一般它比 R-CNN 快 1000 倍、比 Fast R-CNN 快 100 倍。
改进之处:
多尺度预测 (类FPN)
更好的基础分类网络(类ResNet)和分类器 darknet-53,见下图。
分类器-类别预测:YOLOv3不使用Softmax对每个框进行分类,主要考虑因素有两个:
- Softmax使得每个框分配一个类别(score最大的一个),而对于
Open Images这种数据集,目标可能有重叠的类别标签,因此Softmax不适用于多标签分类。 - Softmax可被独立的多个logistic分类器替代,且准确率不会下降。
分类损失采用binary cross-entropy loss.
- Softmax使得每个框分配一个类别(score最大的一个),而对于
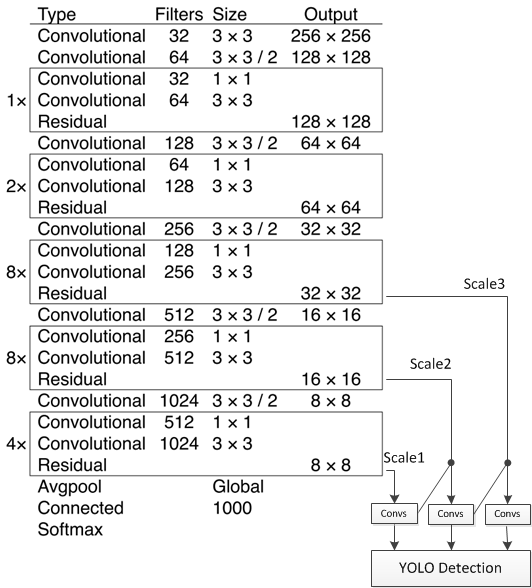
多尺度预测
每种尺度预测3个box, anchor的设计方式仍然使用聚类,得到9个聚类中心,将其按照大小均分给3中尺度.
- 尺度1: 在基础网络之后添加一些卷积层再输出box信息.
- 尺度2: 从尺度1中的倒数第二层的卷积层上采样(x2)再与最后一个16x16大小的特征图相加,再次通过多个卷积后输出box信息.相比尺度1变大两倍.
- 尺度3: 与尺度2类似,使用了32x32大小的特征图.
参见网络结构定义文件yolov3.cfg
基础网络 Darknet-53
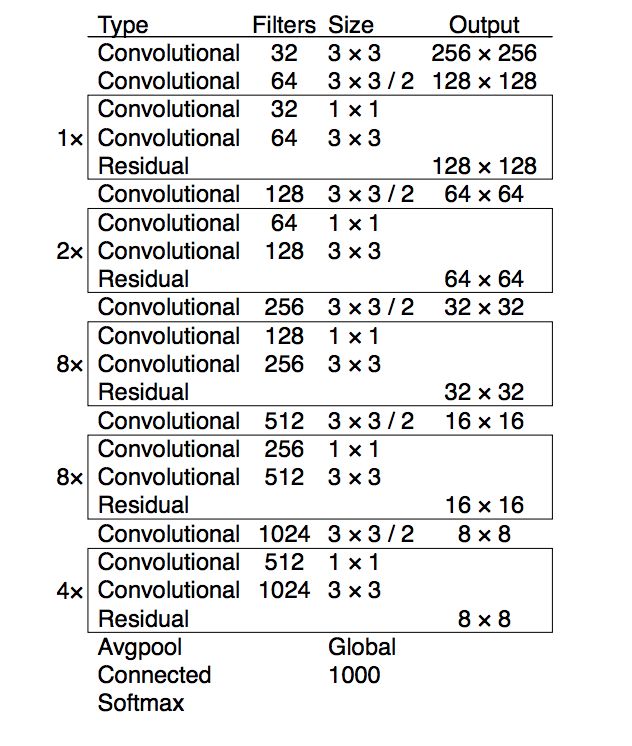
darknet-53
仿ResNet, 与ResNet-101或ResNet-152准确率接近,但速度更快.对比如下:
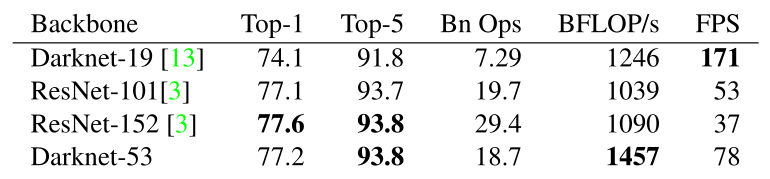
主干架构的性能对比
检测结构如下:
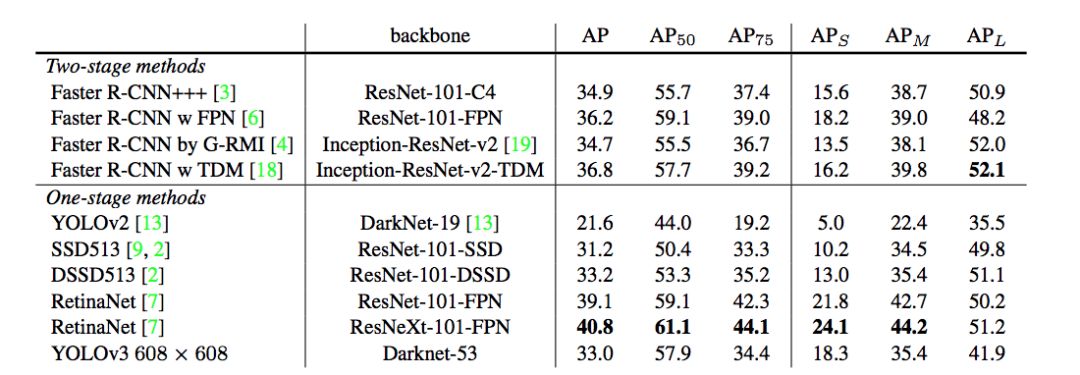
YOLOv3在mAP@0.5及小目标APs上具有不错的结果,但随着IOU的增大,性能下降,说明YOLOv3不能很好地与ground truth切合.
边框预测
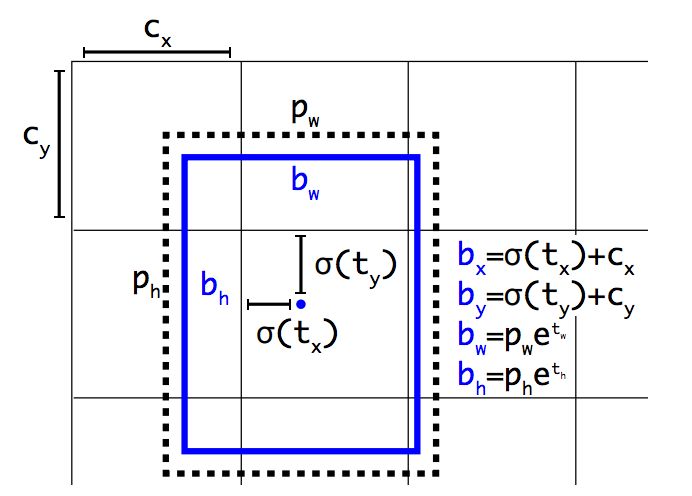
图 2:带有维度先验和定位预测的边界框。我们边界框的宽和高以作为离聚类中心的位移,并使用 Sigmoid 函数预测边界框相对于滤波器应用位置的中心坐标。
仍采用之前的logis,其中cx,cy是网格的坐标偏移量,pw,ph是预设的anchor box的边长.最终得到的边框坐标值是b*,而网络学习目标是t*,用sigmod函数、指数转换。
优点
- 快速,pipline简单.
- 背景误检率低。
- 通用性强。YOLO对于艺术类作品中的物体检测同样适用。它对非自然图像物体的检测率远远高于DPM和RCNN系列检测方法。
但相比RCNN系列物体检测方法,YOLO具有以下缺点:
- 识别物体位置精准性差。
- 召回率低。在每个网格中预测两个box这种约束方式减少了对同一目标的多次检测(R-CNN使用的region proposal方式重叠较多),相比R-CNN使用Selective Search产生2000个proposal(RCNN测试时每张超过40秒),yolo仅使用7x7x2个.
YOLO v.s Faster R-CNN
- 统一网络:
YOLO没有显示求取region proposal的过程。Faster R-CNN中尽管RPN与fast rcnn共享卷积层,但是在模型训练过程中,需要反复训练RPN网络和fast rcnn网络.
相对于R-CNN系列的”看两眼”(候选框提取与分类,图示如下),YOLO只需要Look Once.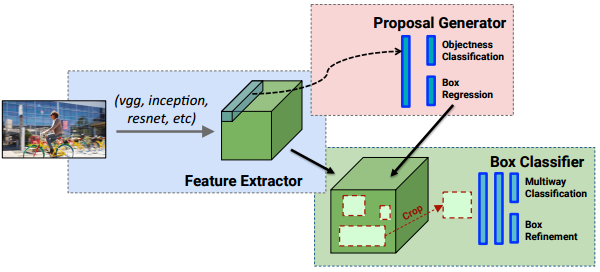
- YOLO统一为一个回归问题,而R-CNN将检测结果分为两部分求解:物体类别(分类问题),物体位置即bounding box(回归问题)。
参考